Overview#
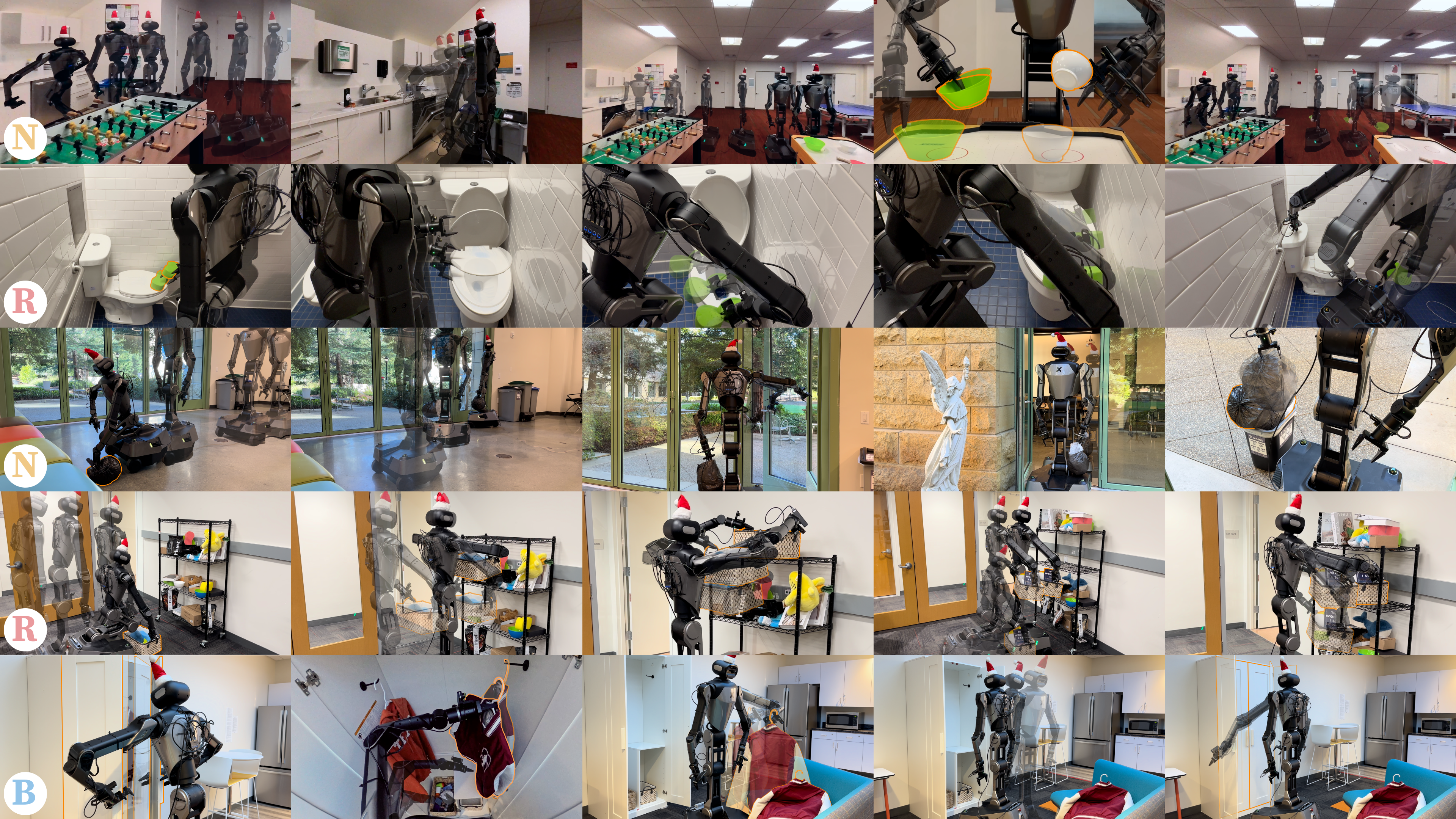
BEHAVIOR Robot Suite (BRS) is a comprehensive framework for learning whole-body manipulation in diverse household tasks. Rooted in the BEHAVIOR-1K project, BRS builds on a bimanual, wheeled robot with a 4-DoF torso, achieving three essential whole-body control capabilities for successfully performing household tasks: bimanual coordination, stable and accurate , and extensive end-effector reachability. BRS integrates a cost-effective whole-body teleoperation interface for data collection and a novel algorithm for learning whole-body visuomotor policies. Key features include:
JoyLo, an open-sourced, cost-effective whole-body teleoperation interface paired with the Galaxea R1 robot;
brs_ctrl, a real-time controller for JoyLo and the Galaxea robots with user-friendly Python interfaces;WB-VIMA, a novel and competent learning algorithm that effectively models coordinated whole-body actions.
Paper and Citation#
Our paper is available on arXiv. If you find our work useful, please consider citing us!
@article{jiang2025brs,
title = {BEHAVIOR Robot Suite: Streamlining Real-World Whole-Body Manipulation for Everyday Household Activities},
author = {Yunfan Jiang and Ruohan Zhang and Josiah Wong and Chen Wang and Yanjie Ze and Hang Yin and Cem Gokmen and Shuran Song and Jiajun Wu and Li Fei-Fei},
year = {2025},
journal = {arXiv preprint arXiv: 2503.05652}
}