ROS Connection#
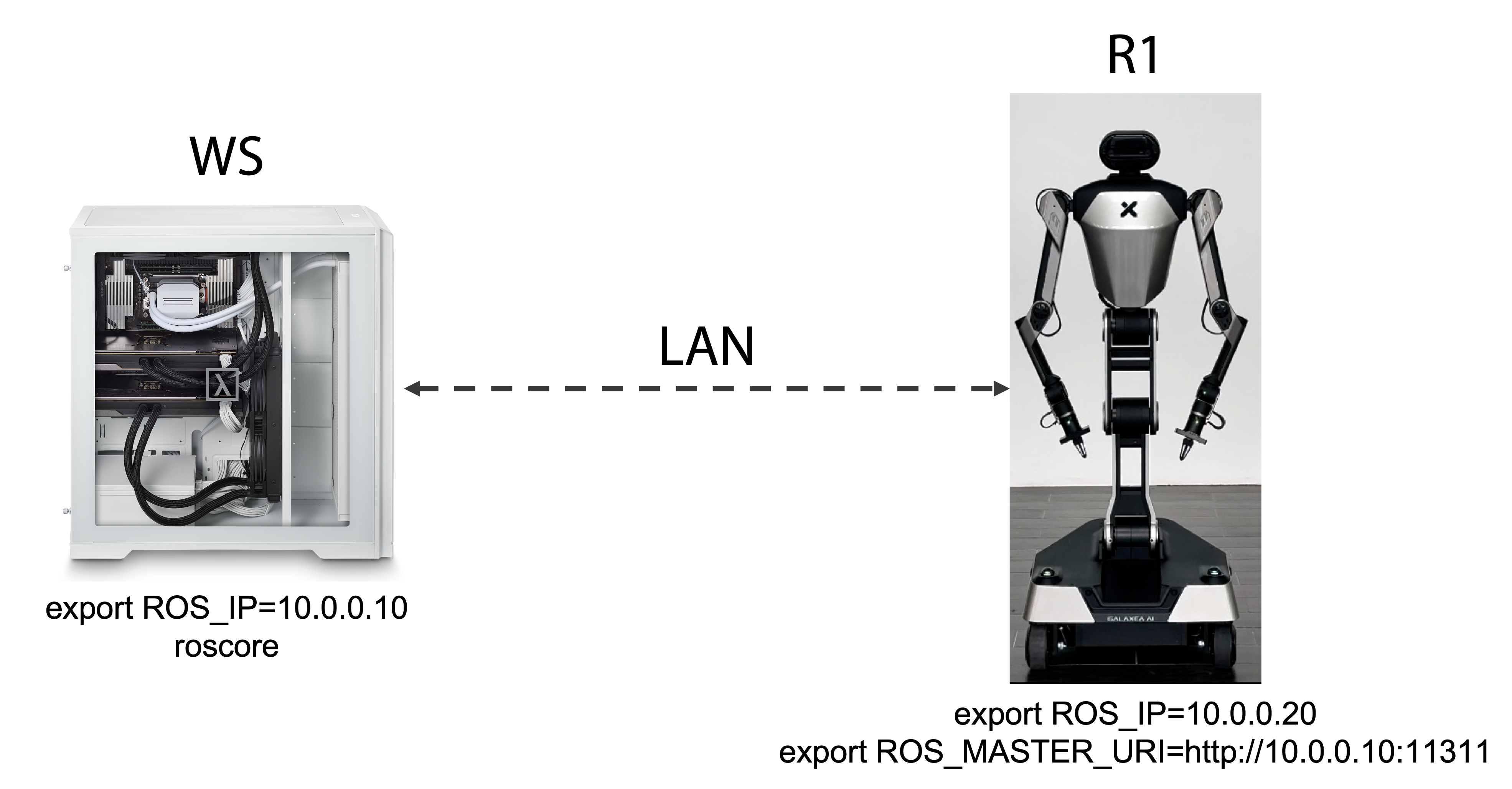
The Galaxea R1 robot communicates with the workstation through ROS. We run the ROS master node on the workstation.
To achieve this, first make sure the workstation and the robot are connected to the same network and can ping each other.
Say the workstation is assigned the static ip 10.0.0.10 and the robot is assigned the static ip 10.0.0.20.
Open a new terminal on the workstation and spawn the ROS master:
conda activate brs
export ROS_IP=10.0.0.10 # this makes sure ROS topics can be addressed properly
roscore
Then take a note of the printed ROS_MASTER_URI, this is usually http://10.0.0.10:11311.
Then on the robot computer, for every rosrun or roslaunch commands, do the following:
export ROS_IP=10.0.0.20 # this makes sure ROS topics can be addressed properly
export ROS_MASTER_URI=http://10.0.0.10:11311
To verify, run rostopic list on the workstation and you should see robot topics.
You should also be able to rostopic echo any of them.